この記事のポイント
 ロボットのセンサーシミュレーションにフォトリアルな精度が求められる開発では、Isaac SimのPhysX+RTXレイトレーシング環境が第一候補
ロボットのセンサーシミュレーションにフォトリアルな精度が求められる開発では、Isaac SimのPhysX+RTXレイトレーシング環境が第一候補- Apache 2.0オープンソース化により商用利用のライセンス障壁がなくなったため、5.0以降での新規導入が最適なタイミング
- 強化学習パイプラインを構築するならIsaac Lab 2.2を活用すべきで、大規模並列学習によりRL開発の効率が大幅に向上する
- 学習データ不足の課題にはCosmosWriter+GR00T Blueprint連携が有効で、データ生成期間を「日→時間」単位に短縮できる
- 汎用性重視ならGazebo、RL速度特化ならMuJoCoも選択肢だが、センサー再現精度と合成データ生成を両立するならIsaac Simを選ぶべき

Microsoft MVP・AIパートナー。LinkX Japan株式会社 代表取締役。東京工業大学大学院にて自然言語処理・金融工学を研究。NHK放送技術研究所でAI・ブロックチェーンの研究開発に従事し、国際学会・ジャーナルでの発表多数。経営情報学会 優秀賞受賞。シンガポールでWeb3企業を創業後、現在は企業向けAI導入・DX推進を支援。
「ロボット開発にシミュレーション環境を導入したいが、どのツールを選べばいいかわからない」
NVIDIA Isaac Simは、Omniverse上に構築されたオープンソースのロボットシミュレータです。GPUアクセラレーションによる高精度な物理演算とフォトリアリスティックなセンサーシミュレーションで、ロボットの知覚・動作・学習を仮想空間で再現できます。
2025年のSIGGRAPH でバージョン5.0がApache 2.0ライセンスでオープンソース化され、Isaac LabによるRL学習、CosmosWriterによる合成データ生成など、ロボットAI開発の中核ツールとして急速に進化しています。
本記事では、Isaac Simの主要機能、Isaac Labによるロボット学習、CosmosWriter連携、Gazebo/MuJoCoとの比較、GPU要件・導入前提まで網羅的に解説します。
NVIDIA Isaac Simとは?
NVIDIA Isaac Simは、Omniverse上に構築されたオープンソースのロボットシミュレーション・合成データ生成プラットフォームです。GPUアクセラレーションによる高精度な物理演算と、RTXレイトレーシングによるフォトリアリスティックなセンサーシミュレーションを組み合わせることで、ロボットの知覚・動作・学習を仮想空間で再現できます。


Isaacエコシステムにおける役割
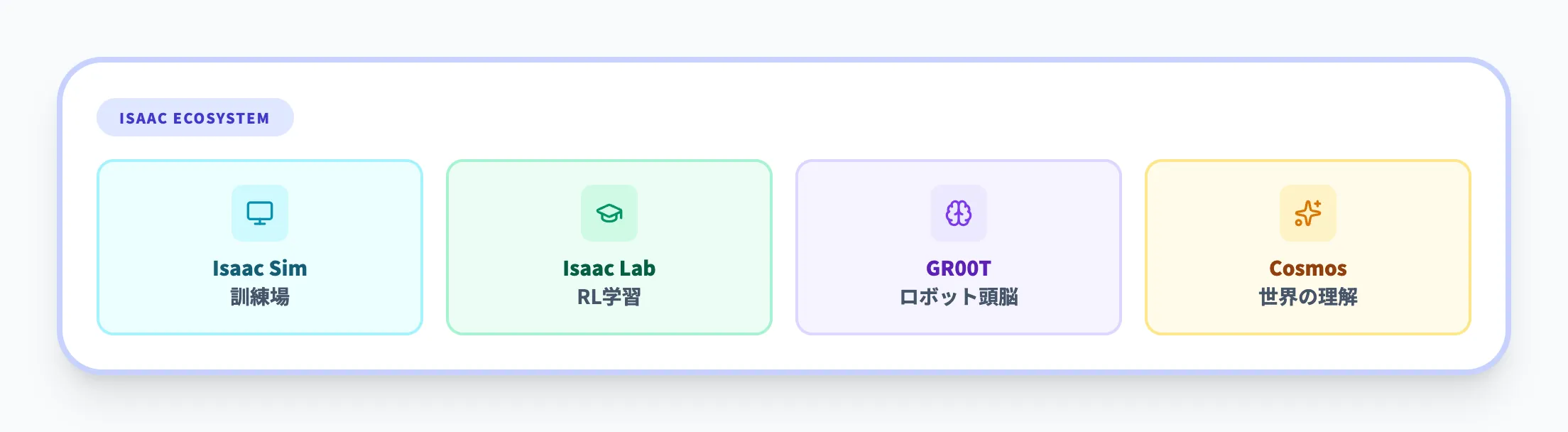
Isaac Simは、NVIDIAのIsaacロボティクスプラットフォームの中で「ロボットの訓練場」にあたる存在です。
-
Isaac Sim ロボットのシミュレーション環境。センサーモデル・物理演算・合成データ生成を担当
-
Isaac Lab Isaac Sim上で動作する強化学習(RL)フレームワーク。ロボットの動作ポリシーをGPUアクセラレーションで高速に学習
-
GR00T ヒューマノイドロボット向けの基盤モデル(VLA)。Isaac SimとGR00T Blueprintの合成データで訓練
-
Cosmos 世界基盤モデル。Cosmos TransferがIsaac SimのCG映像をフォトリアリスティックに変換し、sim-to-realギャップを低減
Isaac Simが「物理的に正確な仮想世界」を作り、Cosmos Transferが「見た目のリアルさ」を加え、GR00TやDRIVE AVが「その世界で学習する」という連携構造です。
Isaac Simが対応するワークフロー

Isaac Simは3つの主要なワークフローをサポートしています。
-
合成データ生成
ロボットの知覚モデル(物体認識・セグメンテーション等)のトレーニングに必要な画像・動画データを、ラベル付きで自動生成する
-
ソフトウェア・ハードウェアインザループテスト
ロボットの制御スタック(ROS 2等)をシミュレーション環境に接続し、実機に近い条件でソフトウェアを検証する
-
ロボット学習(Isaac Lab)
強化学習や模倣学習を使って、ロボットの動作ポリシーをGPUアクセラレーションで高速に訓練する
NVIDIA Isaac Sim 5.0のオープンソース化と主要機能
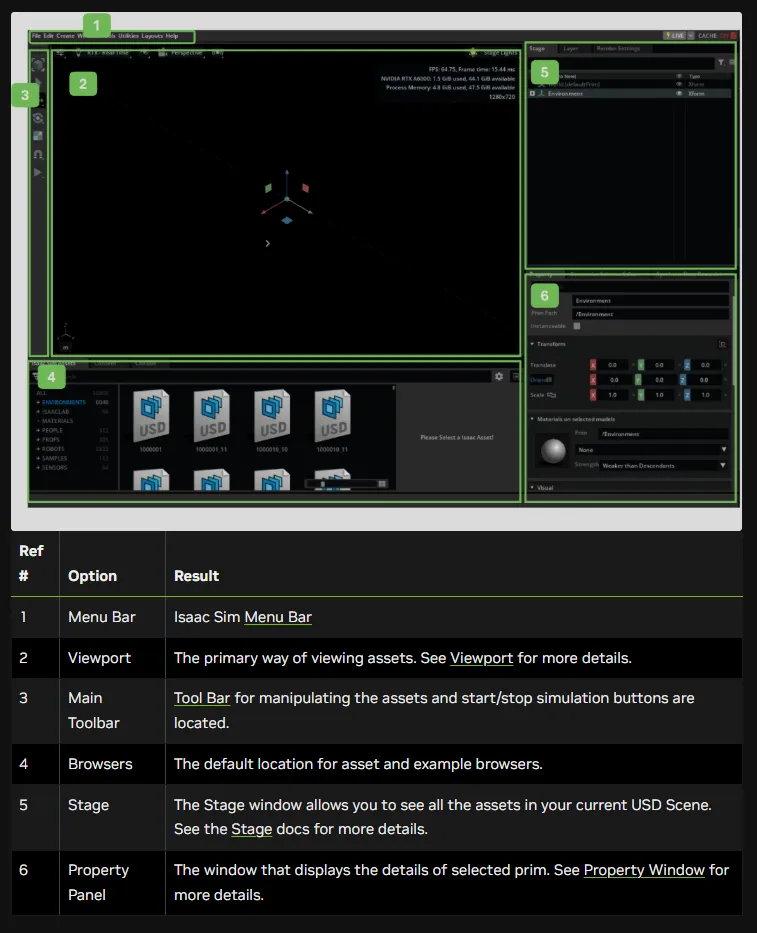
Isaac Simのメイン編集画面(出典:NVIDIA Isaac Sim Documentation)
2025年のSIGGRAPHでIsaac Sim 5.0が2025年6月にearly developer preview、同年8月のSIGGRAPH 2025でGA(一般公開)となり、Apache 2.0ライセンスでオープンソース化されました。GitHubからソースコードとIsaac Sim固有の拡張をダウンロードでき、無料で利用可能です。

オープンソース化の範囲と注意点
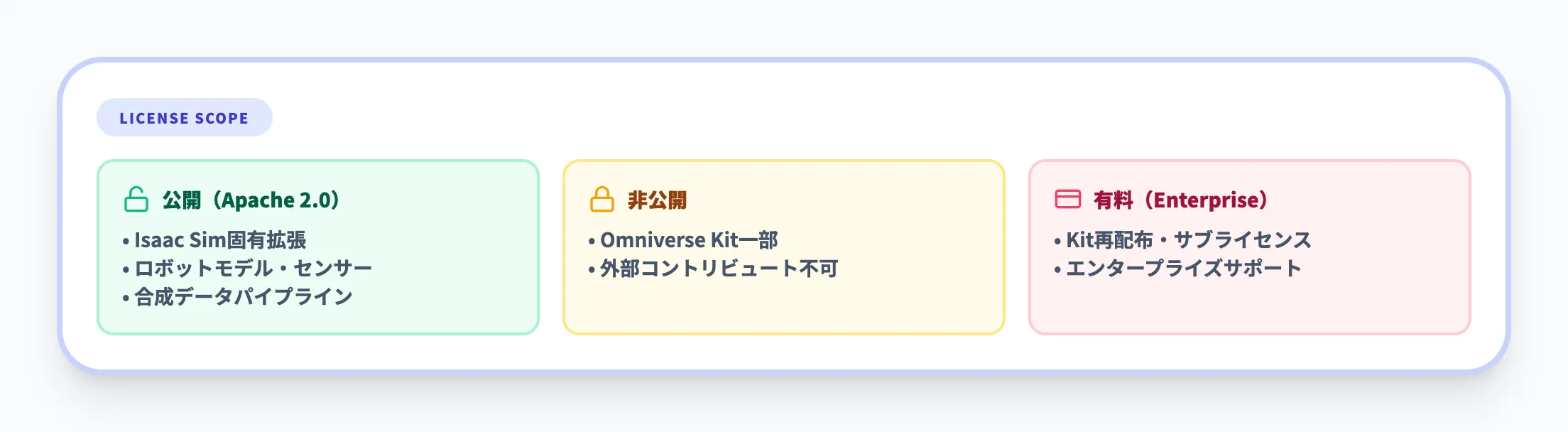
Isaac Sim 5.0のオープンソース化は大きな転換点ですが、すべてが公開されたわけではありません。
-
公開範囲 Isaac Sim固有の拡張(ロボットモデル、センサーシミュレーション、合成データ生成パイプライン等)はApache 2.0で公開
-
非公開部分 Isaac Simの基盤となるOmniverse Kitの一部コンポーネントは非公開のまま。また、外部からのコードコントリビューションは現時点では受け付けていない
-
商用サポート・再配布
エンタープライズ向けの技術サポートやSLA、またOmniverse Kitコンポーネントの再配布・サブライセンスが必要な場合は、Omniverse Enterpriseサブスクリプションが別途必要になる
つまり、「自社内での利用や研究開発は無料だが、Kitコンポーネントの再配布を含むプロダクト出荷や企業レベルのサポートが必要なら有料」という構造です。
PhysXによるGPU物理演算
Isaac Simの物理シミュレーションは、NVIDIAのPhysXエンジンで駆動されています。GPUアクセラレーションにより、衝突判定、剛体・柔軟体シミュレーション、流体力学を高精度かつ高速に処理します。
ロボットの関節トルク、接触力、摩擦など、実機で重要な物理特性を正確に再現できるため、シミュレーションで訓練したモデルが実機でも通用する可能性が高まります。
RTXレイトレーシングによるセンサーシミュレーション

RTXレイトレーシングを活用し、カメラ・LiDAR・超音波センサーなどの出力を物理的に正確にシミュレーションします。Isaac Sim 5.0では新しいOmniSensor USDスキーマが導入され、センサーモデルの定義と管理が統一されました。
フォトリアリスティックなレンダリングにより、実環境に近い品質の画像データが得られるため、合成データで訓練した知覚モデルのsim-to-realギャップを低減できます。
OpenUSDとROS 2統合

Isaac SimはシーンデータにOpenUSD形式を採用しており、CADデータやURDF(ロボット記述ファイル)のインポートに対応しています。また、ROS 2にネイティブ対応しているため、既存のロボットソフトウェアスタックをそのままシミュレーション環境に接続できます。
Isaac Labによるロボット学習
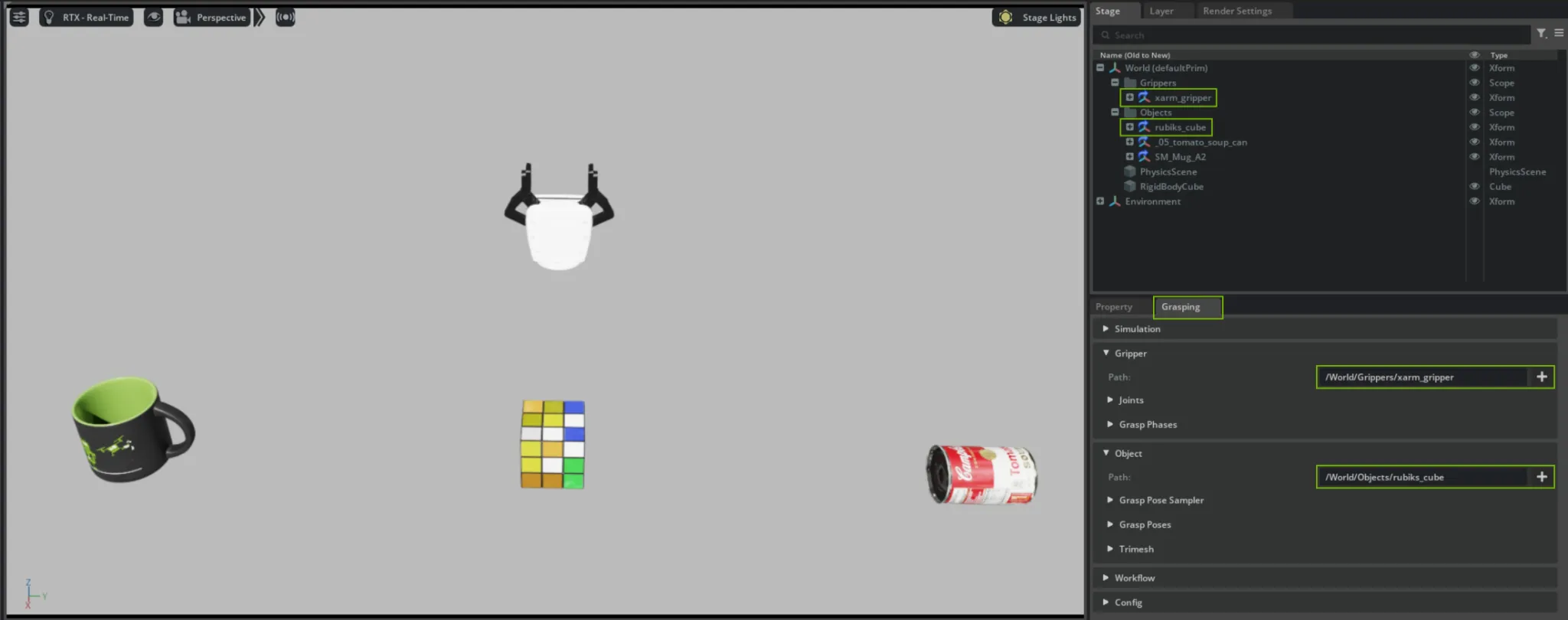
Isaac SimのGrasp Editorによる把持タスク設定画面(出典:NVIDIA Docs)
Isaac Labは、Isaac Sim上で動作する統合型のロボット学習フレームワークです。強化学習(RL)、模倣学習、転移学習などの手法を、GPUアクセラレーションで高速に実行できます。

大規模並列学習

Isaac Labの最大の特徴は、GPU上で数千のシミュレーション環境を同時並列実行できる点です。CPUベースのシミュレータでは1つずつ順番に処理するところを、GPUの並列処理能力を活かして大量の学習エピソードを同時に走らせることで、訓練時間を大幅に短縮します。
Isaac Lab 2.2の新機能
Isaac Lab 2.2(Isaac Sim 5.0と同時リリース)では、以下の機能が追加されています。
-
FORGE/AutoMateタスク
構造化されたタスク定義フレームワークにより、ロボットの操作タスクを効率的に設計・管理できる
-
Stage in Memory / Cloning in Fabric
シミュレーション環境のメモリ管理を最適化し、大規模並列学習のパフォーマンスを向上
-
GR1 Mimic環境
GR00TのMimicワークフローと連携するヒューマノイド学習環境を追加
-
SurfaceGrippers
吸着型グリッパーの物理シミュレーションに対応。物流ロボットのピッキング動作の訓練が可能に
Isaac Labは、学術研究から産業応用まで幅広く使われており、AWSのVAMS(Visual Asset Management System)との連携によるクラウドベースのRL学習パイプラインも構築されています。
ロボット開発シミュレーションの知見を業務全体のAI化に展開する
AI業務自動化ガイドで導入ステップを把握
Isaac Simのような高度なAIシミュレーション技術は、製造・物流の現場にとどまりません。AI総合研究所のガイドでは、業務プロセス全体へのAI導入を段階的に進めるための実践的な手順を整理しています。
CosmosWriterと合成データ生成
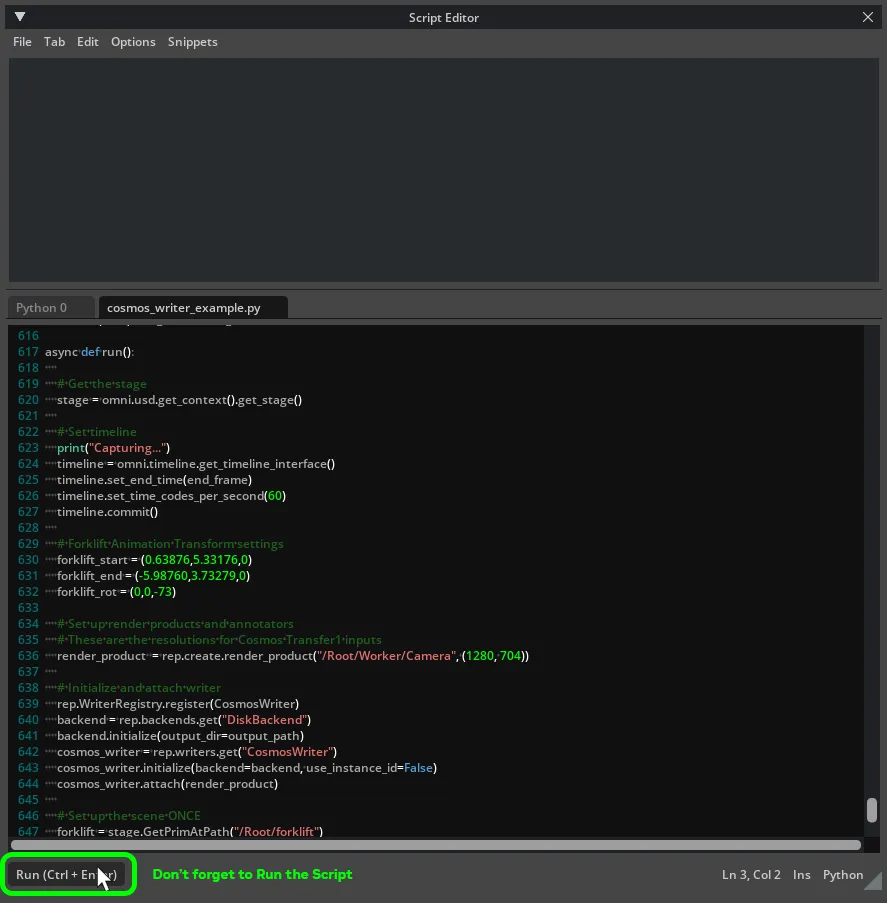
CosmosWriterをScript Editorで実行する画面(出典:NVIDIA Docs)
Isaac Simの合成データ生成機能は、ロボット開発の中核ワークフローの1つです。中でもCosmosWriterは、Cosmos Transfer入力に最適化された新しいデータ出力パイプラインです。

CosmosWriterの役割

CosmosWriterは、Isaac Sim内のシミュレーションからRGB・深度マップ・セグメンテーション・エッジデータを同期して出力するOmniverse Replicatorの新Writerです。出力されたデータはCosmos Transferに直接入力でき、CG映像をフォトリアリスティックな映像に変換することで、ロボットの知覚モデル訓練に使える高品質な合成データが得られます。
合成データ生成のワークフロー

CosmosWriterを使った合成データ生成の典型的なフローは以下のとおりです。
- Isaac Simでロボットと環境をセットアップ OpenUSD形式でシーンを構築し、ロボットのタスクを定義する
- Omniverse Replicatorでバリエーションを生成 照明・物体配置・テクスチャをランダマイズして多様な条件を自動生成
- CosmosWriterで同期データを出力 RGB/深度/セグメンテーション/エッジを同期出力
- Cosmos Transferでリアル映像に変換 CG映像をフォトリアルに変換してsim-to-realギャップを低減
GR00T Blueprintでは、このパイプラインを活用してヒューマノイドロボットの学習データ生成を「日単位→時間単位」に短縮しています。
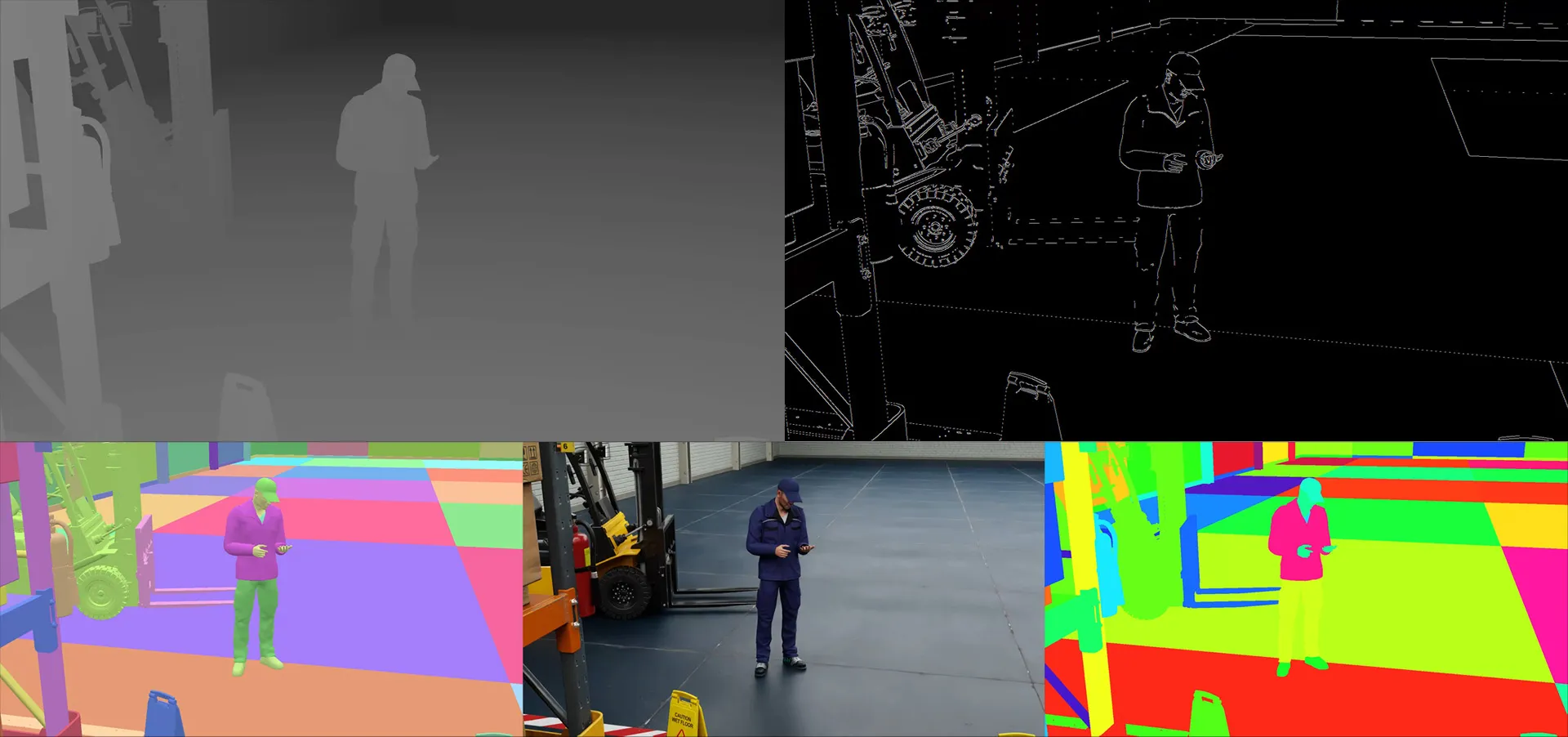
NVIDIA Cosmosによる合成データ生成の例(出典:NVIDIA Docs)
NVIDIAエコシステムとの連携
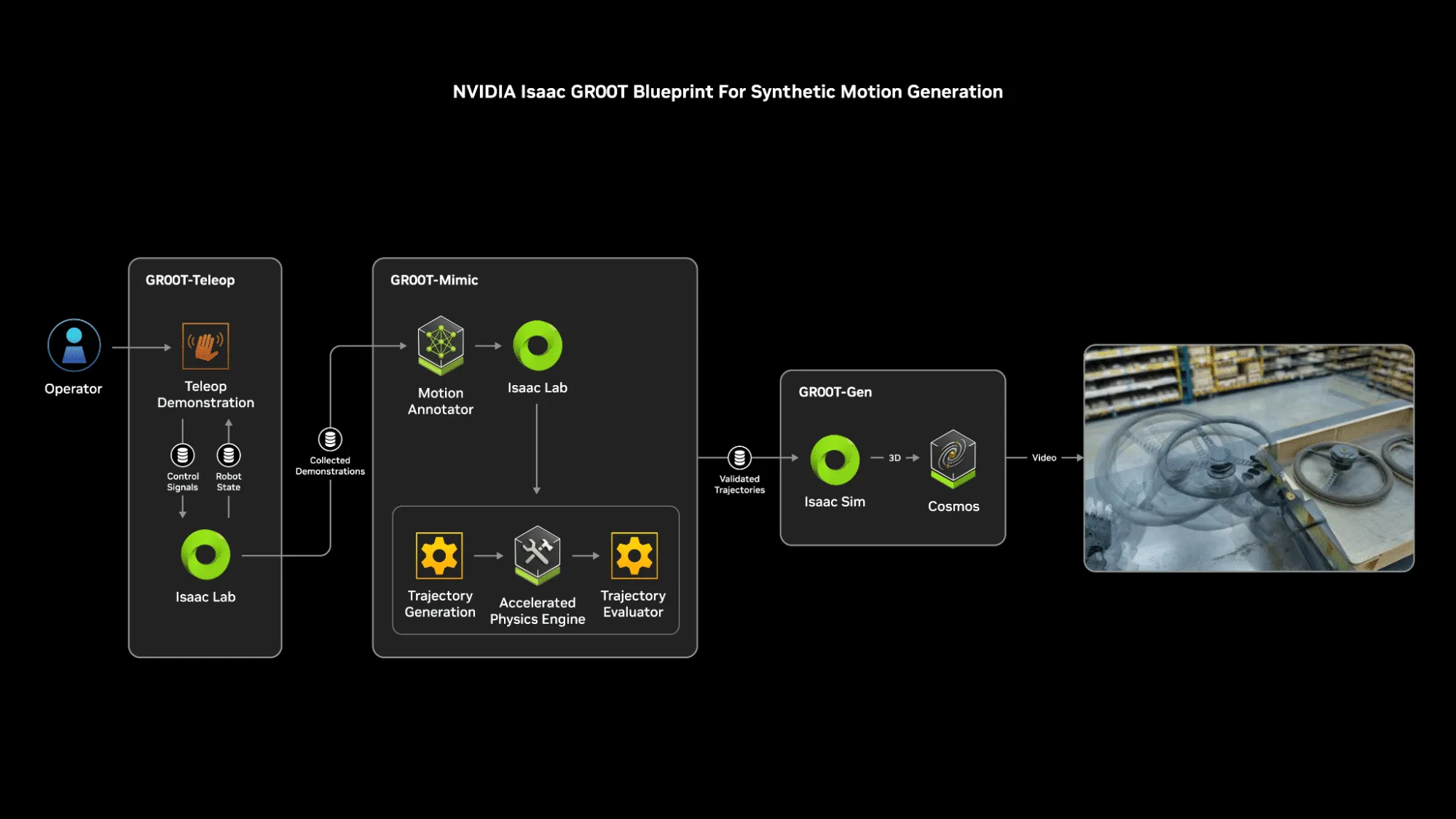
NVIDIA Roboticsプラットフォームのイメージ(出典:NVIDIA Blog)
Isaac Simは単体でもロボットシミュレータとして機能しますが、NVIDIAの他プラットフォームと連携することで開発効率が大きく向上します。

Omniverseとの関係
Isaac SimはOmniverse上に構築されており、Omniverseの3Dレンダリング・物理演算・OpenUSDシーン管理機能を活用しています。Omniverseが「3Dシミュレーションの基盤」、Isaac Simはその上に乗る「ロボット特化のアプリケーション」という関係です。
Cosmosとの連携

CosmosのPredict 2.5とTransfer 2.5は、Isaac Simの合成データパイプラインを拡張します。
- Cosmos Transfer Isaac SimのCG映像をフォトリアルに変換。sim-to-realギャップの低減
- Cosmos Predict 走行・動作シナリオの未来予測動画を生成。学習データの多様性拡張
GR00Tとの連携

GR00TのBlueprintワークフロー(Mimic/Gen/Dreams)は、Isaac Simのシミュレーション環境を基盤として動作します。Isaac Simが「仮想世界」を提供し、Cosmos Transferが「見た目のリアルさ」を加え、GR00Tが「その世界で動作ポリシーを学習する」という3層のパイプラインです。
他のロボットシミュレータとの比較
ロボット開発で選択肢となるシミュレータは複数あります。ここではIsaac Simと、広く使われているGazeboおよびMuJoCoを比較します。
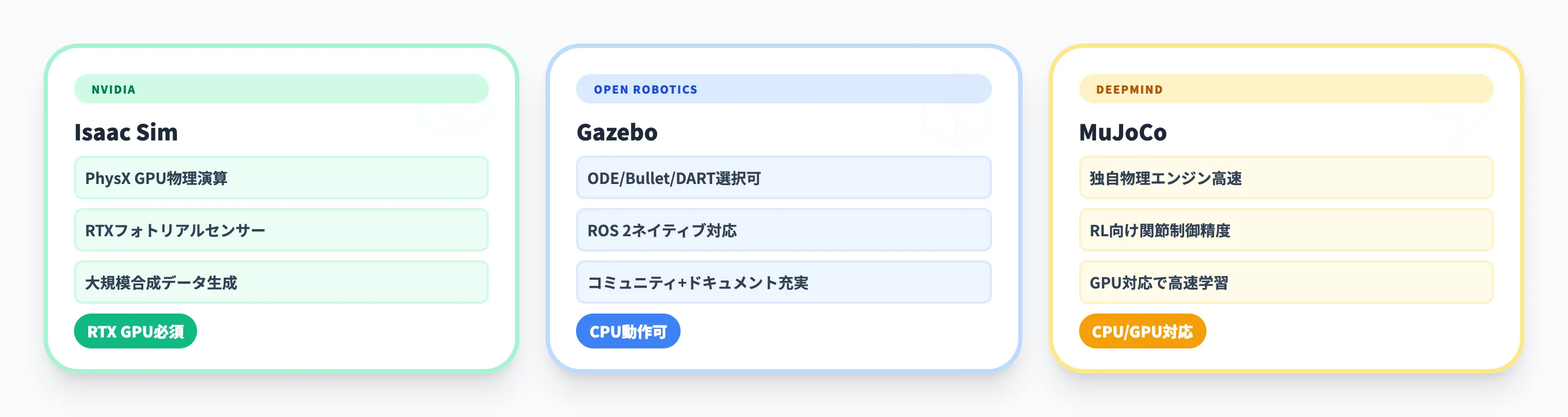
以下の表に、2026年3月時点の代表構成で主要な違いを整理しました。
| 項目 | NVIDIA Isaac Sim | Gazebo Harmonic | MuJoCo |
|---|---|---|---|
| 物理エンジン | PhysX(GPU) | ODE/Bullet/DART | MuJoCo独自 |
| レンダリング | RTXレイトレーシング | OGRE2 | 基本的なOpenGL |
| センサー精度 | フォトリアリスティック(実環境に近い) | 中程度 | 基本的 |
| RL学習速度 | GPU並列で高速(Isaac Lab) | CPU逐次 | GPU対応で高速 |
| ROS 2対応 | ネイティブ対応 | ネイティブ対応 | プラグイン経由 |
| ライセンス | Apache 2.0 | Apache 2.0 | Apache 2.0 |
| GPU要件 | RTXクラス必須 | CPU動作可 | CPU/GPU |
| 強み | フォトリアルセンサー + 大規模合成データ | 汎用性 + コミュニティ + 低要件 | RL速度 + 関節制御精度 |
選定の判断基準を整理すると、以下のようになります。
- フォトリアルなセンサーシミュレーションと合成データ生成が必要 → Isaac Sim
- 汎用的なロボットシミュレーションを手軽に始めたい、GPUが手元にない → Gazebo
- 強化学習のポリシー訓練を最速で回したい → MuJoCo
ただし、これらは排他的な選択肢ではありません。MuJoCoで高速にポリシーを訓練し、Isaac Simのフォトリアル環境でsim-to-real検証を行う、という組み合わせも実用的です。
RoboCup 2024で発表された比較研究では、HSR(Human Support Robot)のビジョン・物体検出タスクにおいてIsaac SimがGazeboより実環境に近い結果を示したとする報告があります。ただし、これは特定ロボット・特定タスクでの結果であり、用途によって最適なシミュレータは異なります。
Isaac Simの導入の前提とGPU要件
Isaac Simはオープンソースで無料利用できますが、GPUアクセラレーションを前提とした設計のため、ハードウェア要件は他のシミュレータと比べて高めです。
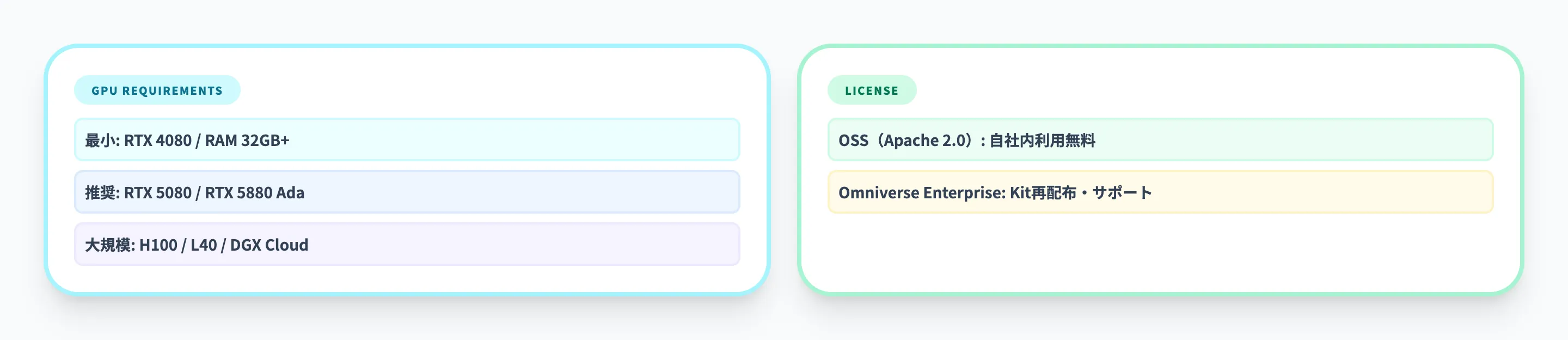
ハードウェア要件

Isaac Simの動作には、NVIDIAのRTXクラス以上のGPUが必要です。
-
最小要件
公式READMEではローカルワークステーションの最小GPUとしてRTX 4080が示されている。RAM 32GB以上
-
推奨要件
RTX 5080 / RTX 5880 Ada以上。大規模なシーンや高品質なRTXレンダリングに対応
-
大規模学習・合成データ生成
H100/L40ノードやDGX Cloud。Isaac Labの大規模並列RL学習やGR00T Blueprintの合成データパイプラインを活用する場合
GPUが手元にない場合は、AWSやDGX CloudなどのクラウドGPU環境から始めるのが現実的です。
ライセンスとサポート

-
オープンソース(無料) Isaac Sim本体はApache 2.0で商用利用を含め無料。GitHubからダウンロード
-
商用サポート・再配布(有料) エンタープライズ向けの技術サポート・SLA、またOmniverse Kitの再配布・サブライセンスが必要な場合はOmniverse Enterpriseサブスクリプションが必要。価格はNVIDIAとの個別交渉
「自社内での利用・開発は無料だが、Kitコンポーネントの再配布やエンタープライズサポートが必要なら有料」という構造です。
インストール方法
Isaac Sim 5.0以降は、以下の方法でインストールできます。
- GitHubからソースコードをクローンしてビルド
- pipベースでの依存関係セットアップ
- サンプルシーンを起動して動作確認
5.0からはGitHubベースのインストールが可能になりましたが、pipベースのセットアップドキュメントも公開されています。環境に応じて選択してください。
ロボット開発のAI活用から業務プロセス全体のAI化を考える
Isaac Simのようなシミュレーション基盤が示すのは、AIが単一工程ではなく開発・検証・運用のプロセス全体を変革できるという事実です。ロボット開発で培ったAI活用の知見は、製造ライン管理・品質検査・在庫予測といった周辺業務にもそのまま応用できます。
AI総合研究所では、製造・物流を含むさまざまな業種で業務プロセスへのAI導入を支援してきました。ロボット開発の自動化を起点に、バックオフィスや意思決定プロセスまで含めた業務全体のAI化を検討されている方は、AI業務自動化ガイドで導入の全体像と具体的なステップをご確認ください。
ロボット開発シミュレーションの知見を業務全体のAI化に展開する
AI業務自動化ガイドで導入ステップを把握
Isaac Simのような高度なAIシミュレーション技術は、製造・物流の現場にとどまりません。AI総合研究所のガイドでは、業務プロセス全体へのAI導入を段階的に進めるための実践的な手順を整理しています。
まとめ
NVIDIA Isaac Simは、ロボット開発のシミュレーション・合成データ生成・学習をGPUアクセラレーションで統合するプラットフォームとして、5.0のオープンソース化を経て急速に進化しています。
-
Isaac Sim 5.0でApache 2.0オープンソース化。PhysX GPU物理演算 + RTXフォトリアルセンサーシミュレーションで、実環境に近い仮想世界を構築
-
Isaac Lab 2.2で強化学習パイプラインを統合。GPU並列で数千環境の同時学習が可能。FORGE/AutoMateタスクやStage in Memory/Cloning in Fabricで大規模学習を加速
-
CosmosWriterでCosmos Transfer入力に最適化された合成データを同期出力。GR00T Blueprintとの連携でロボット学習データ生成を「日→時間」単位に短縮
-
Gazeboは汎用性と低要件、MuJoCoはRL速度と関節精度で強いが、Isaac Simはフォトリアルなセンサー再現と大規模合成データ生成で差別化。HSRのビジョンタスクではGazeboより実環境に近い結果が報告されている
-
Apache 2.0で自社内利用・開発は無料。ただしOmniverse Kitの一部は非公開で、Kitコンポーネントの再配布やエンタープライズサポートにはOmniverse Enterpriseサブスクリプションが必要
GTC 2026(2026年3月16〜19日)ではIsaac Simのさらなる進化が発表される見込みです。最新情報はNVIDIA GTC公式ページをご確認ください。
AI総合研究所では最新AIの企業導入、開発、研修を支援しています。AI導入の企業の担当者様はお気軽にご相談ください。